

Et voila, la 4.2 pointe le bout de son nez avec cette RC2 mais que faut -il savoir de cette mise à jour de Betaflight ? Regardons ça ensemble !
Déjà, c’est quoi RC2 ?

RC2 Veut dire Release Candidate 2 soit la 2 version de la mise à jour qui contient toutes les fonctionnalités et qui ne corrige que les bugs. C’est à dire une version proche de la version finale !
Une version proche mais pas finalisée alors attention lors de vos tests. Certains bugs peuvent subsister et c’est le but des RC, de trouver les bugs et de les corriger pour la version finale.
Mais alors quels sont les ajouts ?
Déjà une mise à jour de tous les outils autour de Betaflight avec une mise à jour du configurateur, du blackbox Explorer et des lua scripts.
Ensuite le réglage des PIDs a grandement changé et donc les PIDs de la version précédente ne sont pas transposables. Vous devrez donc retuner vos quads mais pas de panique, les devs ont donné des notes de réglage que vous pouvez lire ici.
Lors de la mise à jour, le protocole des ESC est par défaut désactivé. Cela permet de bien faire correspondre la PID Loop avec le protocole des ESC. Si vous ne sélectionnez rien, vous aurez un message de warning dans l’OSD et vous ne pourrez pas armer. Autre chose à propos des protocoles ESC et de la PID Loop, si vous activez le RPM Filter et donc le DShot Bi-directionnel, la PID Loop se divisera par deux ainsi que le protocole des ESC. C’est pour libérer du temps aux ESC pour renvoyer les infos à la FC.
Pour ceux qui utilisent l’accéléromètre (notamment pour le mode rescue), vous devrez absolument le calibrer avant de décoller. Si cela n’est pas fait, le quad ne s’armera pas et un message sera affiché dans les warnings.
Une correction du capteur de courant virtuel a été faite pour bien prendre en compte un éventuel mixer (throttle limit ou boost).
Pour ceux qui utilisaient une alarme de RSSI dBm, il va falloir inverser la valeur d’alarme vu que l’échelle est passé de 130 – 0 à -130 – 0.
Des nouveaux types de rates avec les rates ACTUAL et les QUICK. On vous en parle dans un prochain article.
Ajout d’un paramètre de compensation des gaz en fonction du sag de la batterie. Cela permet d’avoir un ratio gaz/PID plus consistant tout le long de la lipo mais surtout avoir moins la sensation de sag en fin de lipo. Le paramètre permet de « brider » les gaz en début de lipo pour diminuer cette bride quand la tension commence a chuter.
Ajout d’un nouveau mode de vol, le level race. Ce mode de vol est tres connu des pilotes qui volent sous NFE/Silverware. Pour ceux qui ne connaissent pas, je vous recommande de tester. C’est un mode de vol qui mixe de l’angle sur le pitch et garde l’acro sur le roll.
Mais c’est pas tout, Betaflight 4.2 nous reserve encore quelques surprises.
Enfin les petits ajouts mineurs qui font plaisir
- Ajout d’une option pour afficher ou non le logo à l’armement ainsi qu’une option pour régler le temps d’affichage.
- Modifications du code pour supporter d’autres types de composants de gestion d’OSD avec l’ajout du support pour les OSD FrSky
- Ajout du protocole Redpine pour les RX SPI.
- Enfin ajout du camera frame sur l’OSD. Cet ajout est super cool pour ceux qui veulent faire de la capture et surtout du cadrage. Il ajoute une bordure configurable sur l’OSD. Il vous restera à la régler pour la faire correspondre à votre camera HD.

Super comment on l’installe ?
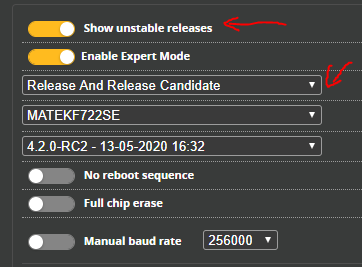
Il vous suffit de mettre à jour votre configurateur et de sélectionner la version 4.2 RC2 dans l’onglet de mise à jour.
Il vous restera à remettre tous vos paramètres de configuration ainsi que refaire vos PIDs. Attention quand même, il peut subsister quelques bugs.
Si c’est le cas, faites un rapport de bug sur le github.
En tout cas je suis pressé de tester ce Betaflight 4.2 quand il sera finalisé. Et vous ?