

Le domaine du drone FPV est assez technique. Il faut donc potasser un peu, regarder des vidéos, s’informer. Cette FAQ du drone FPV est là pour aider, avoir des bases posées, savoir où aller chercher l’information. Elle est destinée aux débutants, évidement, mais pas uniquement. Nous espérons que chacun y trouvera un bout de connaissance à acquérir.
On le voit régulièrement sur le Groupe Facebook, les débutants posent régulièrement des questions, et à juste titre. Cependant, par manque de vocabulaire pour trouver les bonnes réponses sur le net, ou par simple flemme de recherche, ils posent parfois des questions qui ont déjà été posées 100 fois. Cette répétition entraine la lassitude des plus anciens et parfois des débats sur le groupe culture FPV, qui noient les autres posts et font disparaitre des questions plus intéressantes. Cette FAQ a donc aussi été créée pour pallier à ce souci. Nous pourrons renvoyer les débutants qui posent ces questions directement sur cette FAQ et garder le fil d’actualité des abonnés du groupe Facebook Culture FPV plus propre.
Si certains mots vous semblent incompréhensibles, trop techniques, trop destinés aux aficionados, passez voir notre lexique du drone FPV.
SOMMAIRE
Les conseils pour débuter
Comment débuter le drone FPV ?
Il y a énormément de réponses possibles à cette question. Notre réponse a été formalisée en 5 étapes dans une vidéo afin d’en faciliter l’accès.
Vous trouverez cette vidéo ici.
Quel budget faut-il pour commencer le drone FPV ?
Encore une question dont la réponse peut prendre beaucoup de formes différentes. Notre guide d’achat vous permettra de faire des choix basés sur notre expérience et les retours de la communauté. Je vais quand même vous donner une fourchette un peu large, avec le prix minimum qu’il faut compter et le prix nécessaire pour du haut de gamme.
Radio : entre 30 et 250 €
Masque ou Lunettes FPV : entre 60 et 650€
Pièces pour monter son drone : entre 150 et 400€
Chargeur Lipo (batteries) : entre 40 et 200€
Lipos : entre 20 et 35€ l’unité, comptez entre 5 et 10 LiPos à avoir.
Tous nos conseils sont dans notre guide d’achat. Nous avons également écrit un article avec plusieurs possibilités en décembre 2020 qui est encore d’actualité, vous le trouverez ici.
Côté build perso, jetez un œil à notre série d’articles La config du mois, qui donne des exemples très concrets de drone à monter soi-même.
Quels sont les composants que l’on trouve dans un drone FPV ?
Tous les drones disposent à peu près des mêmes composants. En tout cas, de composants ayant la même fonction.
Les moteurs propulseront votre machine, ils seront dirigés par le contrôleur de vol qui leur transmettra ses ordres via les ESC. La caméra FPV est connectée au VTx afin d’envoyer l’image embarquée en temps réel à votre système de réception vidéo. Le tout alimenté par une batterie (LiPo).
Vous souhaitez approfondir certaines notions de composants ? Passez voir les articles du guide des composants d’un drone FPV.

C’est quoi les pouces ?
Quand on parle de 5 pouces, 4 pouces, 7 pouces… On parle en fait de la taille des hélices. 1 pouce est égal à 2,54cm. La taille des hélices définit la taille générale du drone. Les frames sont conçues pour accueillir certaines tailles d’hélices. On peut parfois faire varier la taille possible d’hélice en changeant les bras du drone.
Quels sont les outils nécessaires ?
Pierre Anne vous a fait un article plutôt complet sur le sujet :

Eh bien cet article est fait pour vous, je résume dedans tout le matériel recommandé pour monter votre premier drone, et pour la maintenance, ainsi que quelques propositions de « packs » classés par budgets.
Les Lipos
Qu’est ce qu’une Lipo ?
Une réponse très complète à cette question est développée dans un article dédié.
Vous trouverez cet article ici.

Faut il commencer en 3S,4S, 5 ou 6S sur un 5 pouces ?
Une question qui nous est souvent posée quand on parle de débuter sur un 5 pouces. Le 3S est complètement dépassé, voir dangereux sur un 5 pouces. Il est donc à bannir. La question légitime serait 4 ou 6S.
Nous vous conseillons de passer directement au 6S sur votre drone 5 pouces. Les batteries forceront moins, auront une meilleure durée de vie, et vous gagnerez peut être un peu en autonomie. Si vous avez peur que votre drone soit trop puissant pour vous, il existe des méthodes simples pour réduire sa puissance.
Nous vous en parlons dans ce tuto.

Comment charger une Lipo ?
Vous avez de la chance, on a fait une vidéo sur le sujet, vous la trouverez ici :
Comment charger ses Lipos en parallèle ?
ATTENTION, la charge en parallèle peut être très dangereuse si vous ne suivez pas le bon protocole. Avant de vous lancer, lisez ce guide !

Est-ce dangereux de charger ses Lipos?
Oui, cette activité, si vous ne vous renseignez pas avant peut provoquer des incendies. Avec la bonne méthode, le risque diminue grandement mais ne disparait pas. Privilégiez des environnements qui empêcheront le feu de se propager en cas de soucis. Un barbecue, une grande étendue de béton, par exemple. Ne chargez pas dans votre salon sur un meuble en bois… Prévoyez et aménagez un endroit dédié à cette tache.
En cas de doute sur une Lipo, débarrassez vous en (voir question suivante), pas la peine de risquer son appartement ou la vie de ses proches pour économiser 30€ !
Comment me débarrasser de Lipos abimées
La première chose à faire est de vider complètement la lipo. Vous trouverez dans le commerce des Lipo killer. Même si il existe d’autres méthodes plus « bricolage », si vous n’êtes pas un expert, faites le avec du matériel comme un Lipo killer.
Une fois vidée, protégez les connecteurs à l’aide de scotch d’électricien, et déposez les Lipos à la déchèterie locale.
Ma Lipo est abimée, est-ce que je dois m’en séparer ?
Il est difficile de vous donner un guide précis sur le point de non retour d’une Lipo. D’une façon générale, si une cellule est abimée, enfoncée ou sent une odeur chimique, débarrassez vous en. Je l’ai déjà dit dans cette FAQ, mais je le redis, en cas de doute sur une Lipo, débarrassez vous en (voir question précédente), pas la peine de risquer son appartement ou la vie de ses proches pour économiser 30€ !
Faut-il roder ses Lipos?
Il n’y pas de preuve qu’il soit nécessaire de faire des rodages sur ses Lipos. Personnellement, je ne le fais pas et mes Lipos vont très bien. Il y a quelques précautions à prendre pour augmenter leur durée de vie, c’est l’objet d’une autre question.
Pour le rodage je vous invite à regarder la vidéo suivante de Tof FPV.

Comment augmenter la durée de vie de ses Lipos ?
Il existe quelques règles simple pour optimiser la durée de vie de vos Lipos, en voilà quelques unes :
- Ne descendez pas la tension en dessous de 3.6V par cellule. Affichez la tension de la lipo sur l’OSD et posez vous dès que vous arrivez à 3.6V par cellule
- Utilisez des hélices et kV adéquats. Ce point est assez compliqué à développer, mais si votre Lipo dure 1mn en vol, vous avez sûrement un souci. Quad trop lourd, trop de kV sur les moteurs, pas des hélices trop élevé.
- Mettez vos Lipos en mode stockage avec votre chargeur quand vous rentrez de session. Ouais, je sais c’est chiant, mais c’est vraiment un point très important pour une longévité optimisée
Quelle Lipo acheter ?
Comme pour le reste du matériel, vous trouverez des réponses dans notre guide d’achat.
Pour faire rapide et généraliste, en 4S on utilise plutôt des 1300 à 1500 mAh. En 6S plutôt du 1000 à 1300mAh. Mais il n’y a pas vraiment de règle à part adapter sa Lipo à son objectif et à son quad (plus petite pour les petits quads avec des petits moteur, plus grosse pour les gros quads). Côté taux de décharge, dont l’unité est le nombre de C (capacité à envoyer de forts courants rapidement), le plus haut est souvent le mieux.
Li-ion ou Lipo, différences et usages ?
Les Li-ion ont des avantages et des inconvénients. Elle permettent de descendre la tension de la batterie bien plus bas, en général autour de 2.8V par cellule (vérifier sur la fiche technique de la Li-Ion, cela peut varier). Elle permettra donc des vols plus longs et seront utilisées en Long range ou Mid range. Elle ont comme inconvénient d’avoir un taux de décharge plus faible. Vous aurez donc moins de puissance. Il faut aussi accélérer moins et ne pas dépasser une certaine consommation, généralement indiquée sur la batterie ou sur sa fiche technique.
Betaflight
Qu’est ce que l’airmode ?
C’est une fonction Betaflight qui permet de garder une rotation d’hélice et la boucle PID active même sans gaz. Du coup vous gardez le contrôle sur votre machine, elle ne tombe pas comme une pierre quand vous mettez les gaz à zéro. C’est une fonction plutôt essentielle quand on fait du freestyle, moins essentielle voir pénalisante en whoop car elle a tendance à coller les whoop aux murs ou aux plafonds.
Comment activer l’airmode ?
Vous avez deux méthodes possibles.
La première l’active tout le temps, le bouton se trouve dans l’onglet configuration de Betaflight.
La seconde consiste à le mettre dans l’onglet mode afin de l’activer ou désactiver quand on veut avec un switch de la radio.
Quel est ma version de Betaflight ?
Si vous vous dites que c’est ce truc là : 
Tout faux, c’est la version du configurateur.
Pour connaitre la version du logiciel de vol, rendez-vous dans l’onglet CLI puis tapez : version
Vous aurez la version ainsi que la target (nom de la carte à flasher) de votre carte de vol.
Mon drone ne se connecte pas à Betaflight ?
Essayez de tester avec un autre câble USB (testez-en plusieurs), certains câbles micro USB pas chers ne font que de l’alimentation.
Si après changement de câble rien n’y fait, c’est sûrement un problème de driver.
Les drivers nécessaires à Betaflight sont sur la page d’accueil de Betaflight. Ils sont normalement déjà installés sur un PC récent, en cas de doute, installez-les.
Si cela ne règle pas le problème, je vous conseille d’utiliser le Driver Fixer de ImpluseRC dispo ici. Branchez la FC, et lancez le soft. Il va repérer le driver nécessaire et l’installer. Un redémarrage Windows est parfois nécessaire.
Qu’est ce qu’un UART ?
Un UART est un port qui permet de brancher un périphérique qui peut communiquer avec la FC. Un exemple de périphérique est par exemple un GPS, un smart audio d’un VTx, un vista, etc… L’UART est composé d’un Tx et d’un Rx. Le Rx reçoit des données, le Tx en envoie. Par exemple, un récepteur radio reçoit des ordres de la radio et les envoie vers la FC, il faut donc le connecter sur un port Rx pour que la FC reçoive les informations. Certains périphériques échangent des données dans les deux sens, il faudra donc brancher sur le Tx et le Rx du même UART sur la FC.
Si on prend l’exemple d’un Nano Rx de TBS, il échange des données dans les deux sens avec la FC, il faut donc brancher un Rx et un Tx. Le Tx du nano Rx envoie les données et la FC les reçoit, il faut donc brancher ce Tx du nano Rx sur le Rx de la FC. Quand la FC veut envoyer des données au nano Rx, elle les envoie via le Tx et il doit être relié au Rx du nano Rx pour qu’il les reçoive.
Qu’est ce que le Turtle mode et comment ça fonctionne ?
Le Turtle mode est une fonctionnalité permettant de faire tourner les hélices séparément. Cela permet de remettre le drone dans le bon sens quand il pose sur le dos. Il porte différents noms suivant les firmwares, sur FalcoX par exemple, il s’appele Coppa, sur Betaflight il s’appel le flip over after crash.
Sur Betaflight, il faut aller dans l’onglet mode et assigner le turtle à un switch. Le fonctionnement des modes est expliqué dans cette vidéo. Une fois ceci fait, pour utiliser le turtle il faut :
- Désarmer le drone
- Activer le switch du turtle mode
- Armer le drone
- Utiliser les sticks pour faire tourner les hélices du côté désiré
Transmission vidéo
Analogique ou numérique ?
La réponse est très souvent personnelle. Mon avis sur le sujet, si vous avez les moyens, partez sur du numérique, surtout si vous n’avez pas encore de matériel. Les masques DJI peuvent traiter un signal analogique via un récepteur externe branché sur l’entrée AV. Vous aurez donc de l’analo et du numérique sur votre masque. Même si vous ne pouvez pas encore acheter tous les VTx DJI, vous pourrez voler et vous équiper progressivement.
Mon masque DJI V2 est il compatible avec les airunit et vista ?
La réponse est simple, oui.
Différences entres les lunettes DJI V1 et V2
Elles sont peu nombreuses. Vous aurez besoin d’un V2 si vous souhaitez voler avec le drone FPV de DJI. Sinon, pour le moment, à part la gestion des lipos 6S, elles n’apportent rien. Cela changera peut être dans le futur avec l’arrivée d’une nouvelle génération de VTx DJI gérant le 2.4 et le 5.8GHz, mais pour le moment, ce n’est pas le cas.
Y’a t il un Rx radio dans les vista et air unit ?
Oui ! Ils ne sont compatibles qu’avec les radio DJI. Vous avez la possibilité de les brancher ou non, d’utiliser la radio DJI ou de mettre le récepteur de votre choix et d’utiliser la radio de votre choix.
Est ce que mon VTx est compatible avec les lunettes DJI ?
Il existe 3 technologies différentes (pour faire simple) :
1/ L’analogique : Il faut un VTx analogique (donc pas de vista ni de air unit) et un récepteur analogique appelé VRx.
Ce n’est pas compatible DJI ! On peut recevoir de l’analogique sur un masque DJI en ajoutant un récepteur analogique externe et en entrant dans le masque DJI via la prise AV, mais on aura pas de numérique.
2/ Le numérique DJI : il faut un VTx DJI : soit un caddx Vista ou un Air unit et un masque DJI. À ce jour, aucun autre moyen d’afficher une image envoyée via un de ces émetteurs qu’avec un masque DJI.
3/ Le numérique Shark Byte : Il faut un VTx Shark Byte, et un récepteur Shark Byte. Les récepteurs Shark Byte ont une sortie HDMI, on peut donc afficher le signal sur tout les systèmes d’image possédant une entrée HDMI.. que ce soient des lunettes FPV, une TV ou autre.
Pour faire simple :
DJI compatible avec DJI uniquement
Shark Byte compatible avec Shark Byte uniquement
Analogique compatible avec tous les émetteurs et récepteurs analogiques (y compris ce que l’on peut mettre en entrée du masque DJI)
Comment faire marcher l’OSD DJI ?
Voilà la check liste à suivre pour faire marcher l’OSD DJI :
- Connectez le TX du vista ou airunit sur un RX libre sur la FC (non inversé, donc pas un Sbus)
- Connectez le RX du vista ou airunit sur un TX libre du même UART sur la FC
- Dans l’onglet port de betaflight, activez le MSP pour cet UART (ne pas désactiver l’autre MSP activé)
- Dans l’onglet configuration de betaflight activez la télémétrie et l’OSD
- Dans l’onglet OSD de betaflight activez ce qui vous interesse et placez les éléments à l’endroit souhaité
- Dans le masque, activer le Custom OSD
Si cela ne marche pas, vérifiez bien vos câblages, alimentation et bind.
Pourquoi je n’arrive pas à changer les paramètres de mon VTx ?
La raisons peuvent être nombreuses, voilà une check list
- Vérifiez que votre VTx est compatible avec la techno smart audio ou Tramp télémétrie
- Vérifiez que le câble smart audio ou tramp télémétrie est connecté sur un pad Tx libre
- Vérifiez que le la bonne techno est déclarée dans l’onglet port et sur le bon UART
- Vérifiez que le VTx table est bien paramétrée
- Branchez votre Lipo (sans hélices), puis connectez votre drone à Betaflight, dans l’onglet transmetteur vidéo, il doit y avoir écrit périphérique prêt : oui dans la colonne de droite. Si ce n’est pas le cas, vérifiez les points ci-dessus
Qu’est ce que le VTx Table (table VTx en Français) ?
Le VTx Table est apparu avec Betaflight 4. Il consiste en un tableau de fréquences et de puissances à définir dans Betaflight pour que le firmware puisse contrôler les VTx analogiques. Ceci permettra donc de changer de fréquence et de puissance à distance, sans appuyer sur le bouton du VTx.
Comment les configurer le VTx Table?
Il faut tout d’abord que vous connaissiez le modèle de votre VTx et le type de table à associer. Si il s’agit d’un Tramp ou d’un Unify, c’est plutôt simple. Pour les autres VTx, c’est généralement indiqué sur le site du fabriquant, dans la fiche technique du VTx. Ensuite appliquez la procédure indiquée dans Betaflight, onglet transmetteur vidéo, à savoir :
- Aller sur cette page
- Trouver le fichier de configuration de votre VTx dans votre pays et le télécharger
- Cliquer sur ‘Charger à partir du fichier’ dessous, choisir le fichier de configuration téléchargé précédemment et le charger
- Vérifier que tout est en adéquation avec les données du fabriquant.
Si ça ne fonctionne toujours pas, regardez la question de la faq « Pourquoi je n’arrive pas à changer les paramètres de mon VTx ? »
Les problèmes récurrents
Mes moteurs s’emballent sans hélices / Quand je met un coup de gaz les moteurs n’arrêtent pas de tourner ?
La question la plus posée sur le groupe, et qui nous a poussé à écrire cet article. C’est un phénomène qui arrive souvent, vous êtes tout content de votre montage, vous testez un armement sur votre bureau (SANS HELICES BIEN SUR), et là, surprise, vos moteurs accélèrent sans raison, et vous ne savez pas quoi faire.
Ne vous inquiétez pas, c’est normal. Si vous êtes sur de votre montage, configurez votre Failsafe, montez vos hélices, et allez dans un espace dégagé, et décollez.
Si vous voulez savoir pourquoi, Dom LEE a fait un post dédié sur le groupe pour expliquer ce phénomène.
Dom LEE, sur le post Facebook dédié :
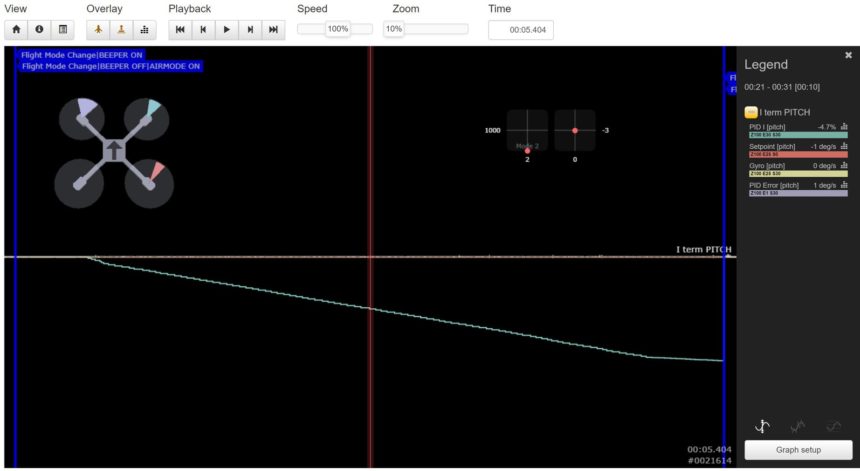
Lorsque vous armez le drone avec le mode « airmode » activé, la boucle PID rentre en action même quand les gaz sont à zéro, afin de maintenir la position à tout moment dans les airs.
Le I (intégale) du PID va faire une somme de l' »erreur » entre la vitesse angulaire cible et celle donnée par le gyro.
Hors, s’il n’y a pas d’hélices, le drone ne peut pas corriger sa position. Etant donné que le quad, même à plat, peut dévier sa position de 1 à 2 degré/s ou votre stick peut très légèrement dévier. La somme des 1deg/seconde va s’accumuler sur le I du PID et intensifier le travail des moteurs tant que l’erreur de « position » ne sera pas corrigée.
En image, la courbe blackbox du I qui s’accumule sur une « erreur » de 1 deg/s en pitch.
En résumé, tout va bien, votre drone réagit normalement.
Pourquoi mon drone ne décolle pas ? Il se retourne quand j’arme et met des gazs
Votre drone ne décolle pas ? Vous ne savez plus quoi faire ? Il y’a plusieurs étapes à suivre pour essayer de faire en sorte qu’il décolle. Dans l’ordre :
1/ Vérifier le sens des hélices (en adéquation avec ce qui se trouve dans Betaflight, onglet configuration)
2/ Vérifier le sens de rotation des moteurs (en adéquation avec ce qui se trouve dans Betaflight, onglet configuration) . Si ce n’est pas bon, vous pouvez inverser le sens des moteurs avec BlHeli configurator pour les ESC en BlHeli_S et BlHeli suite pour les ESC en Blheli 32
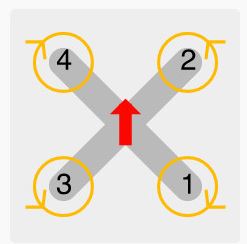
3/ S’assurer du bon sens de la FC, si ce n’est pas le cas, il faut déclarer les rotations dans l’onglet configuration de Betaflight
4/ Vérifier que le numéro des moteurs correspond au moteur (moteur 1 tourne quand vous faîtes tourner le moteur 1 dans l’onglet moteur. Pareil pour le 2, le 3, etc…. Si ce n’est pas le cas, il vous faudra remapper les moteur. Plus d’infos ici.
5/ Rechercher un éventuel problème matériel
Toutes ces étapes sont détaillées dans le tuto dédié

Pourquoi mon drone n’arme pas ?
C’est également une question qui revient très souvent, tellement souvent que Mael en a fait un article dédié. Je vous laisse aller le voir si vous ne l’avez pas encore vu.

Pourquoi mon drone vibre ?
Les vibrations peuvent venir d’énormément de facteurs. La première chose à savoir, c’est qu’avec Betaflight par défaut, un drone n’est pas supposé vibré. Donc inutile de chercher du côté des PID avant d’avoir checké la partie hardware.
Voilà 8 points à checker avant de regarder du côté software (Betaflight ou autre firmware)

C’est quoi les PID ?
Les PID, c’est la partie correction d’erreur du logiciel installé sur nos contrôleurs de vol. Pour simplifier au maximum, quand on demande au drone de faire quelque chose via une commande radio, le contrôleur de vol vérifie que le comportement du drone est en adéquation avec la commande envoyée. En cas d’écart, il applique les paramètres que l’on trouve dans les PID.
Commande > réaction du drone > mesure du résultat > correction apportée par les PID > mesure du résultat, etc….
Ce contrôle et cette correction sont appliqués de nombreuses fois par seconde. On définit ce nombre de fois en changeant la fréquence de la boucle PID. Par exemple, une boucle à 4kHz indique à Betaflight qu’il doit vérifier 4000 fois par seconde.
Comment régler ses PID
Il n’y a pas de méthode miracle. Pas non plus de réponse universelle. Le mieux étant de s’informer sur le fonctionnement pour comprendre les implications de chaque changement de paramètre.
Quelques sources d’information :
Vidéo réalisée avec Damien Gans aka Black Bird

Le Site d’UAVTECH

Les vidéos de Dom Lee
Je rajouterais en substance que si vous débutez, passez votre chemin pour le moment, il faut de l’expérience sur le ressenti de vol pour régler ses PID et le réglage par défaut n’est pas mauvais. Vous pourrez y revenir après avoir passé pas mal de temps les sticks entre les doigts
Mon OSD Betaflight est tout bizarre, comment régler le problème ?
Il arrive parfois que l’OSD Beaflight soit capricieux et affiche ça au lieu de l’OSD.
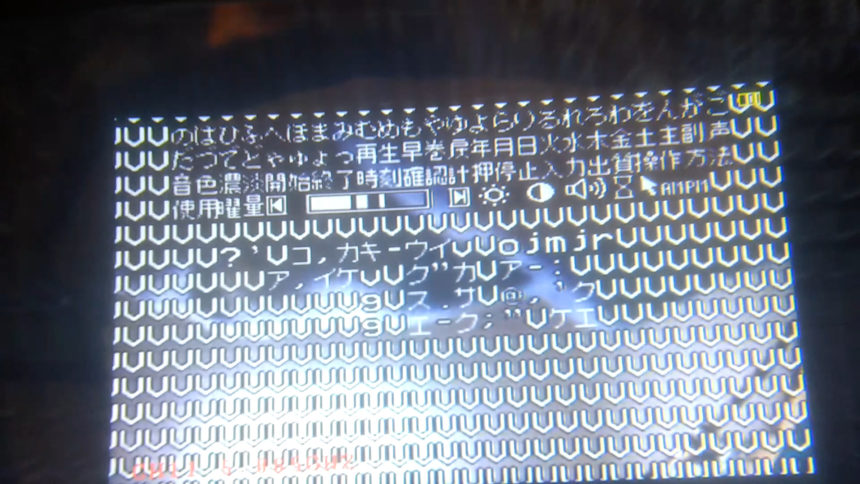
La solution est plutôt simple, mais pas très intuitive. Il s’agit d’un bug avec les polices de caractères, pour le régler, on va simplement les remettre à jour.
Pour ce faire :
- Drone débranché de Betaflight et sans hélices, branchez la Lipo
- Connectez la FC au PC
- Connectez Betaflight et allez dans l’onglet OSD
- Cliquez sur gestionnaire de police (en bas à droite)
- Dans la fenêtre qui s’ouvre, choisissez une police dans le menu déroulant du haut
- Cliquez sur charger le fichier de police
Le drone redémarre et votre problème est réglé.
Que faire si mon drone tombe dans l’eau ?
En premier lieu, débranchez votre lipo sous l’eau.
Ne le rebranchez pas tant qu’il n’est pas séché, ça pourrait causer des dommages. Si vous êtes tombé dans de l’eau douce, il y a de fortes chances pour que le drone puisse récupérer. Si vous êtes tombés dans de l’eau de mer, les chances sont réduites, et vous devriez le passer immédiatement sous l’eau douce de manière abondante.
Ensuite pour le sécher, il y a plusieurs méthodes.
1/ Pas de riz, ça ne sert à rien. Il faudrait que le riz touche toute l’eau présente pour n’absorber qu’une partie de l’eau par capillarité, donc c’est inutile et inefficace.
2/ Mettez le sur un radiateur 24h.
3/ Retirez le TPU présent sur le drone et mettez le drone au four chaleur tournante à 60 pendant 30-45 minutes, puis laissez le reposer jusqu’au lendemain.
4/ Passez le au sèche cheveux. Une bonne vingtaine de minute, sous toutes les coutures , puis laissez le reposer jusqu’au lendemain.
Quelque soit la méthode choisie, rebranchez-le en gardant la main sur la prise Lipo pour le débrancher rapidement en cas de problème. Dans la majeure partie des cas, le drone fonctionnera encore. Faites votre premier vol sans trop forcer sur la machine, juste pour être safe.
C’est quoi ce matos ?
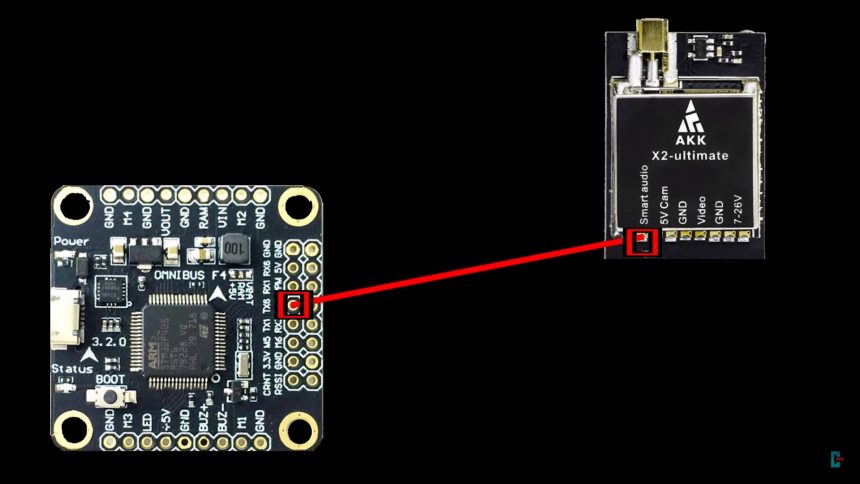
C’est quoi le Smartaudio ?
Le Smartaudio, c’est une fonctionnalité de certains VTx, même de la majorité des VTx récents, qui permet de changer les paramètres de votre VTx à distance grâce à la radio. Les paramètres sur lesquels on peut interagir par exemple, c’est de pouvoir changer la fréquence d’émission, ainsi que la puissance d’émission.
C’est très simple à mettre en place, il suffit de raccorder le fil dédié de votre VTx à un uart libre de votre FC (photo ci-dessous), puis il faut configurer le Smartaudio dans Betaflight, c’est très rapide, ça prend 2 minutes, vous avez un tuto ici en anglais.
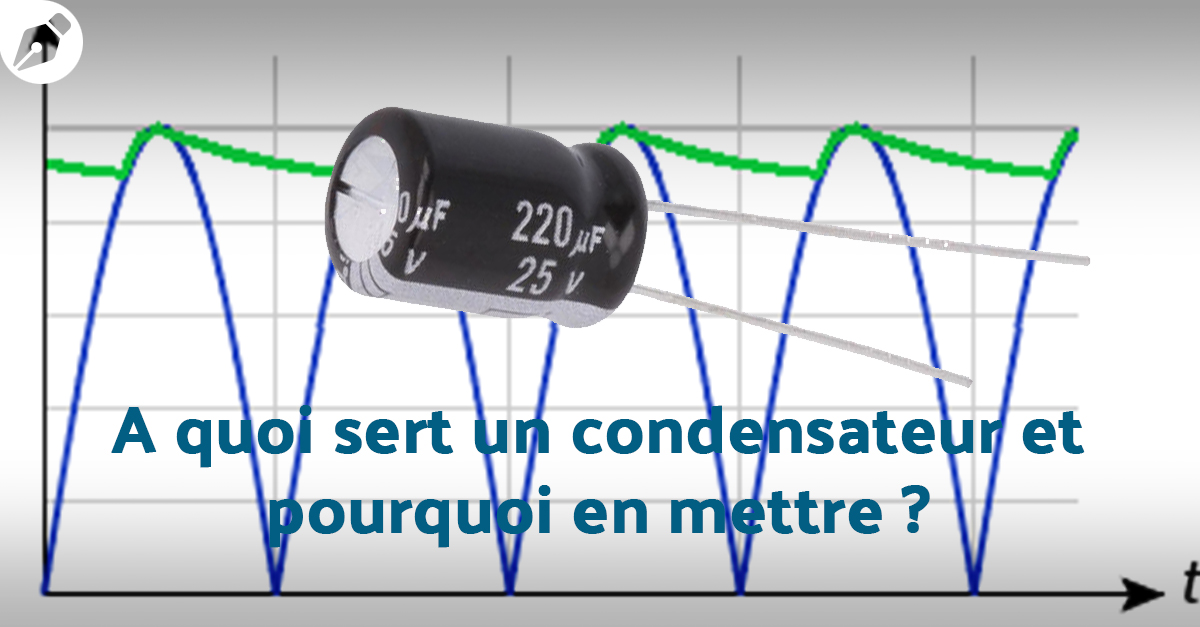
C’est quoi un condo ? A quoi ça sert ? Où je le place ? Comment je le soude ?
Un condensateur, ou condo en abrégé comme on l’appelle souvent, c’est tout simplement une mini batterie qui permet de stocker de l’énergie et de la redistribuer. Le condensateur permet de lisser la tension en cas de pic positif ou négatif (attention, négatif ne veut pas dire en dessous de 0V).
Pour le monter sur votre machine, il faut le connecter au plus près de l’ESC en changeant les fils qui sont dessus. Si vous avez un ESC 4 en 1, reliez le coté blanc au GND de l’ESC et l’autre coté au + de l’ESC.
Si vous voulez plus d’infos sur ce qu’est un condensateur, suivez cet article.
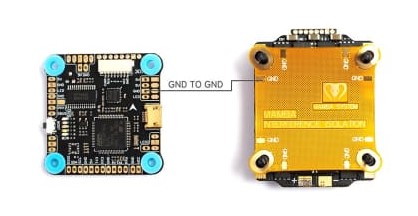
C’est quoi la plaque en cuivre livrée avec ma stack ? On la monte comment ?

Ce genre de truc là ? C’est une plaque qui fait office de bouclier anti interférences entre l’ESC et la FC, vous la recevez avec les stacks Mamba entre autres.
Est-ce vraiment utile ? Certains volent avec, d’autres sans, à vous de voir si vous la montez ou non.
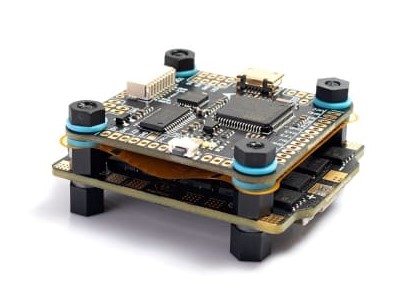
Pour le montage, ça se monte en raccordant un pad GND de la plaque sur UN SEUL pad GND de la FC. Elle doit être aussi proche de la FC que possible.
Une fois monté ça donne ça.
Montage de drone
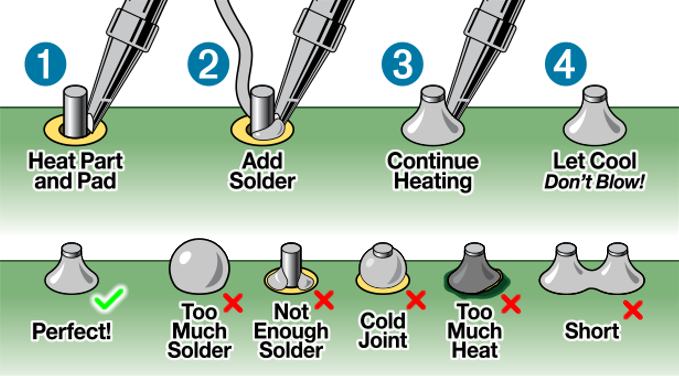
Comment juger si mes soudures sont correctes ou bien si il faut que je recommence ?
Une soudure électronique (brasure) ça se fait comme ça :
Avec un fer à 400-450°C et de l’étain de bonne qualité qui contient du flux.
Voici une image pour vous aider à identifier des bonnes soudures et aussi celles qu’il faudra recommencer.
Qu’est ce qu’un condo et à quoi ça sert ?
Vous avez de la chance, Mael vous a fait un article complet sur le sujet !
Les radios et leurs problématiques
Quel radio avec quel drone ?
La radio et le drone échangent des données via des protocoles. Une sorte de langage que la radio et le drone doivent avoir en commun pour communiquer. Une bonne partie de ces protocoles sont propriétaires et exclusifs. J’entends par là qu’un protocole de chez Frsky ne sera pas compatible avec le protocole Crossfire, par exemple. Il vous faut donc un couple Rx (récepteur radio) et Tx (transmetteur radio, (partie de la Radiocommande qui émet) compatible. Vous allez me dire, une radio Frsky émet donc en Frsky, et bien oui et non. Le Tx interne sera bien en Frsky, mais il y a sur les radio des baies permettant de mettre d’autres modules Tx externes. Une QX7, par exemple a une baie qui permet de brancher un module Tx Crossfire, un module Tx multiprotocole, etc…. Il faut donc bien différencier le Tx de sa radio et celui de la baie.
Pour faire simple :
Un Tx Frsky n’est compatible qu’avec les Rx Frsky.
Un Tx Crossfire n’est compatible qu’avec un Rx crossfire
Un Tx Flysky n’est compatible qu’avec un Tx Flysky
etc….
Pour rendre compatible une radio flysky avec un autre protocole, il faut lui ajouter un Tx externe parlant le bon langage, le bon protocole.
Quel est la portée de mon rx/radio ?
L’environnement joue un rôle majeur pour définir la distance possible. En terrain dégagé Frsky aura une portée d’environ 1/1.5km. Le crossfire lui, dans les mêmes conditions pourra aller à plusieurs dizaines de kilomètres.
Qu’est ce que le crossfire ? Est ce vraiment utile d’investir dès le début?
Crossfire est le protocole de TBS. Il permet d’avoir une meilleur portée et une meilleur pénétration du signal en utilisant des fréquences plus basses. 868Hz au lieu de 2.4GHz pour la plupart des autres autres protocoles utilisés. Il nécessite d’avoir un module externe si vous avez une radio d’un autre fabriquant, ou d’avoir la radio de TBS, la Tango 2.
C’est ce qui est le plus utilisé en Long range ou Mid range, mais pas uniquement. Même si vous ne comptez pas aller à 10km, il est intéressant d’avoir un crossfire pour fiabiliser le lien avec le drone. Donc si votre budget le permet, un crossfire est une bonne chose dès le début. Si votre budget ne le permet pas, prenez une radio qui vous permettra d’ajouter un module TX externe dans l’avenir.
Qu’est ce que le RSSI ?
Le RSSI mesure la force du signal de votre radio. Un signal trop faible pourrait provoquer une perte de liaison radio et donc un failsafe. Le RSSI est disponible sur quasiment toutes les combinaisons Rx / Tx. Le RSSI n’est pas le seul indicateur dont il faut tenir compte pour éviter les Failsafes, le LQ est également important (voir question suivante).
Voilà une veille méthode simple pour avoir le RSSI sur les radio Frsky :
Qu’est ce que le LQ ?
Le LQ mesure la qualité du lien entre la radio et le drone. À la différence du RSSI qui ne mesure que la puissance, le LQ permet de savoir si les données envoyées par la radio sont bien reçues par le drone.
Il est donc préférable de se fier au LQ car il vaut mieux avoir un signal faible mais de qualité qu’un signal fort mais de mauvaise qualité.
Le LQ n’est pas disponible sur tous les protocoles. On le trouve sur Crossfire, par exemple.
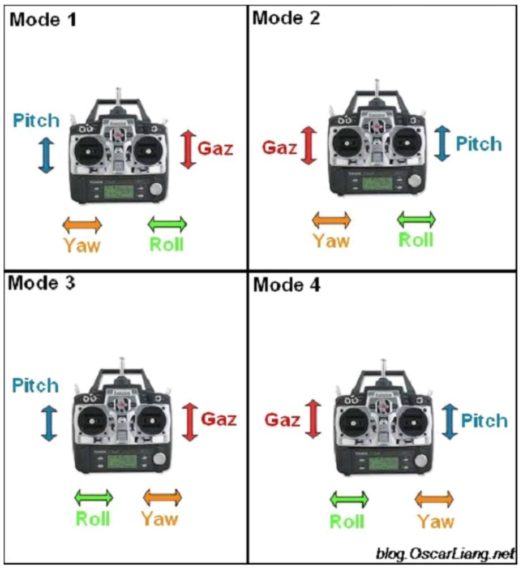
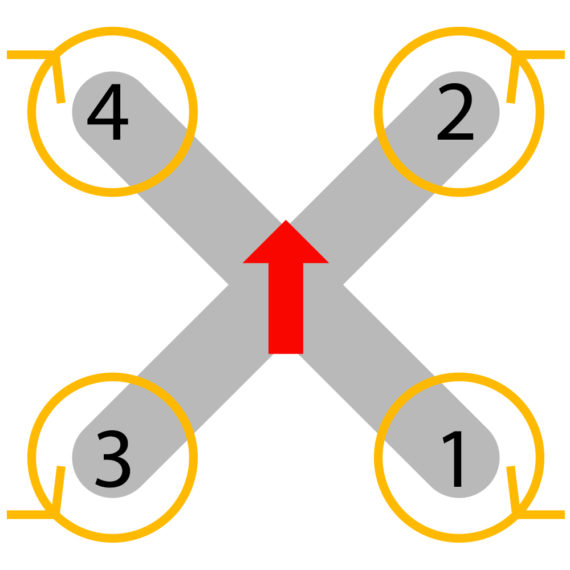
Qu’est ce que les modes 1, 2, 3 et 4 ?
Les modes 1,2,3,4 correspondent à 4 assignements différents des 4 axes des radiocommandes.
Le mode le plus commun en drone est le mode 2. Ceci dit, il n’y a pas de règles, il est donc bon d’utiliser le mode sur lequel vous êtes le plus à l’aise. Certaines radios permettent de passer d’un mode à l’autre dans le logiciel de radio, mais il sera quand même nécessaire d’inversé physiquement les sticks.
Exemple : en mode2, les gaz sont sur l’axe vertical du joystick gauche, le yaw sur l’horizontal, le pitch sur l’axe verticale du joystick droit et le roll sur l’horizontal.
Hélices et moteurs
Comment changer le sens de rotation des moteurs ?
Pour changer le sens de rotation de vos moteurs, vous allez avoir besoin du logiciel BLHeliSuite ou BlheliSuite32 (Blheli suite pour les ESC en BlHeli_S et BlHeliSuite32 pour les esc en BlHeli32 disponible ici.
N’oubliez pas de retirer vos hélices avant toutes manipulation sur ordinateur !
- Ouvrez l’application BLHeliSuite ou BlHeliSuite32
- Sur BlHeliSuite, ouvrez l’onglet Select ATMEL/SILABS interface et sélectionnez l’option E
- Connectez votre drone par USB (sans batterie) en utilisant le port COM qui correspond au drone
- Cliquez sur Connect
- Branchez votre batterie
- Cliquez sur Read Setup
- Cliquez 2 fois sur ok
- Allez dans l’onglet Motors cochez la case « I understand the risks… »
- Faites tourner vos moteurs (sans hélices) et identifiez les moteurs qui tournent dans le mauvais sens
- Retournez dans l’onglet principal
- Désélectionnez 3 moteurs et gardez celui qui tourne dans le bon sens (chiffres 1/2/3/4 en bas) ou faites un clique droit sur le chiffre du moteur que vous voulez sélectionner (cela désélectionnera les autres)
- Dans l’option Motor direction, changer l’état (normal si vous étiez en motor reverse ou moteur reverse si vous étiez en normal
- Cliquez sur Write setup pour sauvegarder
Attention, cette manipulation sert uniquement à changer le sens de rotation des moteurs. Ils faut que réglage soit cohérent avec celui de betafight. Vérifiez donc la cohérence avec betaflight, onglet configuration
Dans quel sens met on ses hélices ?
Les hélices doivent être mise en respectant le schéma que vous trouverez dans betaflight, onglet configuration
Attention, il s’agit uniquement de la déclaration dans betaflight, il faut que vos moteurs tournent dans le sens indiqué. Pour cela, référez vous à la question précédente
Dans quel sens doit on mettre ses hélices ?
Sur les hélices, les écritures sont du le haut de l’hélice. Assurez vous donc que cette partie soit bien en haut.
Les pales ont un côté plus élevé que l’autre (flèche bleu sur l’image ci-dessous). Cette partie de l’hélice doit fendre l’air en premier. Sur l’image ci dessous, l’hélice doit donc tourner dans le sens des aiguilles d’une montre.

Les prochaines questions à intégrer à la FAQ
- C’est quoi la nappe livrée avec ma stack ? Et pourquoi y’en a deux ?
- Bind Frsky : FCC EULBT, ACCES et ACCTSBind Frsky : FCC EULBT, ACCES et ACCTS
- Qu’est-ce que la télémetrie ?
- Failsafe à très courte distance, que faire?
- Perte de vidéo à très courte distance, que faire ?
- Quelle taille de drone pour quel usage ?
- Rhcp Lhcp
- Sma Rpsma
- Banggood est-il fiable et quel est le délai de livraison ?
- Comment déterminer le condo à mettre sur votre drone ?
- Comment choisir ses moteurs ?
- Est ce normal que mon VTX chauffe ? comment éviter qu’il brule ?
- Quel est la différence entre BlHeli_S et BlHeli32 ?
Demandez un ajout à la FAQ
Vous n’avez pas trouvé la réponse à votre question ? Proposez un ajout en remplissant le fomulaire ci-dessous
[contact-form-7 id= »17833″ title= »proposition d’ajout FAQ »]