

Vos ESC sous BLHeli_S fonctionnent toujours mais vous voudriez profiter du RPM Filter de BF 4.2 ? Pas de panique, je vais vous monter comment faire !
Déjà, c’est quoi le RPM Filter ?
C’est une fonctionnalité de BetaFlight qui permet d’ajuster les filtres en temps réel en fonction de la vitesse de rotation des moteurs.
Mais alors comment faire pour connaitre la vraie vitesse de rotation des moteurs ?
Il faut que BetaFlight puisse la récupérer, et pour cela on utilise le DShot Bi-Directionnel. Il faut également compter le nombre de pôles dont dispose le moteur (le nombre d’aimants sur la cloche, souvent 12 ou 14).
Pour le nombre de pôles, très bien je sais compter jusqu’à 15 mais pour le DShot Bi-Directionnel ? Je fais comment pour l’avoir ?
Si vous avez des ESC BLHeli_32, suivez le tuto de JTrue ou mettez à jour vos ESC.
Pour les autres, il existe 2 méthodes. Mais attention, il faut d’abord verifier que vos ESC sont bien compatibles.
Comment vérifier que mes ESC BLHeli_S sont compatibles avec le DShot Bi-Directionnel ?
Retirez vos hélices, lancez BLHeli configurator, branchez votre LiPo et cliquez sur Read Setup.
Si vos ESC ont un H dans leur nom c’est bon !

Sinon désolé mais vos ESC ne sont pas compatibles et ce tuto ne vous servira pas.

Maintenant qu’on a déterminé que nos ESC sont bien compatibles, il existe deux méthodes :
La premiere avec JESC. C’est un firmware pour ESC développé par le mec qui a apporté le DShot Bi-Directionnel. Il a un petit site (jflight.net) où tout est expliqué en anglais. Il vous faudra une licence par ESC (environ 2€ la licence). Et après via son configuration, vous pourrez configurer vos ESC. Il ne vous restera plus qu’à activer le RPM Filter et le DShot Bi-directionnel dans BetaFlight.
La deuxième et c’est celle que je vais vous présenter, c’est un autre firmware mais cette fois-ci gratuit. Il s’agit de JazzMaverick.
Flasher ses ESC BLHeli_S sous JazzMaverik
On retourne dans BLHeli_S Configurator et on va cliquer sur Flash All après avoir bien relevé le target de l’ESC (le nom de l’ESC).
Pour moi c’est G-H-30

Rendez vous ensuite sur le GitHub de JazzMaverick pour récupérer le firmware.
Dans ce répertoire GitHub, vous trouverez plusieurs versions, je base ce tuto sur la 16.73 mais libre à vous de tester (je ne serai pas responsable si ça ne marche pas par contre hein ;) )
Entrez donc dans le dossier de version (ici 16.73) et retrouvez le .hex qui correspond a votre ESC (pour moi ça sera le G_H_30_REV16.73). Cliquez dessus.
Clique-droit sur Raw puis enregistrer le lien sous…

Puis enregistrez le fichier (pour moi : G_H_30_REV16_73.HEX)
Retournez sous BLHeli_S Configurator et dans la fonction Flash All cliquez sur Select File Manually puis récupérez votre fichier .HEX

Une fois les ESC Flashés, débranchez le tout et direction BetaFlight Configurator.
Activer le DShot Bi-Directionnel
Dans l’onglet Configuration, cliquez sur Bidirectional DShot et entrez le nombre de pôles (le nombre d’aimants) de vos moteurs.

Un petit save and reboot plus tard et on se retrouve dans l’onglet motors.
Si tout se passe bien, vous devez vous retrouver avec le taux d’erreurs DShot a 0% (E: 0.00%).

Si au contraire il est a 100% c’est sûrement que vous n’avez pas branché la LiPo. Mais avant de le faire, on retire les hélices !

Maintenant on met un peu de gaz et si il y a moins de 1% d’erreurs, c’est bon on peut décoller !

Si vous avez plus de 1% testez en DShot 300 et si vous en avez encore, descendez en DShot 150. Si meme en DShot 150 vous avez encore trop d’erreurs, alors je suis désolé mais vous allez devoir abandonner et oublier le RPM Filter pour cette fois. Soit vous désactivez simplement le Dshot Bi-Directionnel soit vous reflashez vos ESC en plus.
Configuration de la PID Loop
Le DShot Bi-Directionnel est plutot gourmand en ressource. Les dev de BF recommandent une PID Loop de 8K8K en DShot 600 si vous ne pouvez pas utiliser le DShot 600 ou le 8K8K passez en 8K4K DShot 300 ou bien 4K4K DShot 300
Réglage du Filtre RPM
L’avantage du RPM Filter c’est qu’il fait tout le gros du boulot. Il permet de désactiver pas mal de filtres et donc de gagner en latence.
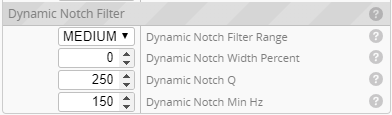
On commence donc par régler le Dynamic Notch Filter. Il faut qu’il soit quand même présent pour éliminer le bruit généré par les roulements des moteurs, le vent et la résonance de la frame.
Ensuite pour ceux qui ont déjà un build qui marche pas mal, ne changez rien. Pour les nouveaux builds et ceux qui ont des petits soucis, utilisez la configuration suivante :
# 4.1 default lowpass filter set
set gyro_lowpass_type = PT1
set gyro_lowpass_hz = 200
set dyn_lpf_gyro_min_hz = 200
set dyn_lpf_gyro_max_hz = 500
set gyro_lowpass2_type = PT1
set gyro_lowpass2_hz = 250
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 100
set dyn_lpf_dterm_min_hz = 70
set dyn_lpf_dterm_max_hz = 170
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 150C’est le moment de tester. Volez tranquillement et controlez la température de vos moteurs. Si tout va bien on passe à la suite. Si vous avez un filtre en biquad passez le en PT1 (un par un tout en testant en vol entre chaque changement). Augmenter la valeur du lowpass filter cutoff ou alors en le désactivant en le mettant a 0. Encore une fois, contrôlez la chauffe de vos moteurs.
Si les premiers tests se passent bien on va continuer de modifier les filtres.
# 4.1 lowpass filter set shifted up 1.5x
set gyro_lowpass_type = PT1
set gyro_lowpass_hz = 300
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 900
set gyro_lowpass2_type = PT1
set gyro_lowpass2_hz = 350
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 150
set dyn_lpf_dterm_min_hz = 100
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 200Si à l’armement les moteurs font un bruit bizarre ou bien que le quad a un comportement étrange, c’est surement que vous avez trop de D. Baissez le.
Si ça se passe bien, on va encore diminuer la latence et éliminer le propwash.
# 4.1 lowpass filter set shifted up 2x
set gyro_lowpass_hz = 400
set dyn_lpf_gyro_max_hz = 1000
set dyn_lpf_gyro_min_hz = 400
set gyro_lowpass2_type = PT1
set gyro_lowpass2_hz = 500
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 200
set dyn_lpf_dterm_max_hz = 340
set dyn_lpf_dterm_min_hz = 140
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 300Encore une fois on teste le tout et on fait attention à ne pas tout cramer. Normalement vous devriez avoir une filtration au top. Si vous voulez pousser le vice encore plus loin vous pouvez totalement désactiver les low pass filter. Attention parce que si il y’a le moindre soucis dans votre build, vos moteurs vont surchauffer et voir même brûler. Vous êtes prévenus !
Pour désactiver le premier filtre.
set gyro_lowpass_hz = 0
set dyn_lpf_gyro_max_hz = 0Pour désactiver le deuxième
set gyro_lowpass2_hz = 0Si vous voulez pousser l’aventure encore plus loin, voici la page du github de Betaflight qui vous indiquera tout ce qu’il faut savoir sur le RPM Filter et le DShot Bi-Directionnel.
J’espère que ce petit tuto vous aura plu, si vous avez des questions n’hésitez pas à les poster en commentaire. Bons vols à tous !
1 commentaire
Super article ! Si je ne me trompe pas JazzMaverick a une version « L » sur son Github, c’est peut être pour les ESC en O-L au lieu de G-H non ?