

Tu veux concevoir ton propre quad? Tu ne sais pas par où commencer? Quel diamètre rotor, quelle batterie choisir, quelle durée de vol tu peux espérer? Ces quelques lignes, synthétisées dans la feuille de calcul téléchargeable ici, t’apporteront un premier élément de réponse à tes questions.
Rotors – la théorie aéro
A l’origine de tout, les rotors (ou les props). Si on veut savoir comment se comporte notre quad en vol, il faut comprendre comment interagissent nos props avec l’air qui les entoure. Selon la théorie la plus simple, les props peuvent être représentées par des disques qui propulsent une colonne d’air vers le bas, et génèrent en réaction une poussée proportionnelle à la masse d’air expulsé et à sa vitesse d’expulsion. De cette théorie, on peut déduire de précieuses informations :
- Pour un miniquad d’une masse totale donnée, la puissance nécessaire au vol est directement proportionnelle au diamètre rotor. Autrement dit, plus ton diamètre rotor est grand, plus tu voleras longtemps. Par exemple, remplacer des props 5″ par des props 6″ sur ton quad se soldera immédiatement par une diminution de 20% de la puissance moyenne consommée à l’hélice.
- Pour un diamètre rotor donné, la puissance nécessaire au vol est proportionnelle à la masse à l’exposant 3/2. Par exemple, une augmentation de masse de 10% se soldera par une augmentation de la puissance consommée de plus de 15%.
- Sur un mini quad quel qu’il soit, il est contre-productif d’embarquer une batterie qui représente plus de la moitié de la masse totale au décollage de l’appareil. Pire encore, avec une batterie qui pèse plus de 2/3 de la masse totale de l’appareil, le temps de vol va baisser.
- Un quad optimisé pour maximiser le temps de vol aura donc les caractéristiques suivantes: masse totale la plus faible possible, diamètre rotor le plus grand possible, environ 40% à 50%(en masse) d’une batterie dont la densité énergétique sera la plus élevée possible.
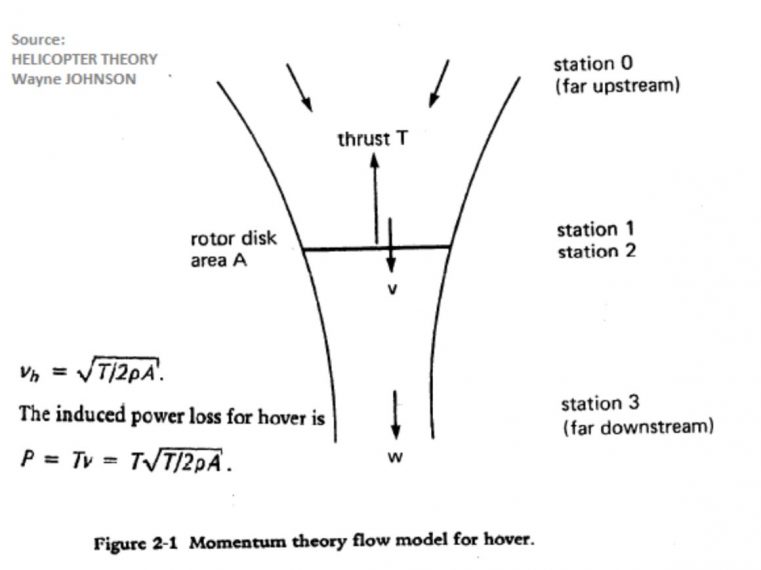
Pour les curieux, cette théorie s’appelle la Théorie de Froude, ou Momentum Theoryen anglais. De nombreux articles sur internet en détaillent les hypothèses et les résultats. Ce qu’il faut retenir, c’est que cette théorie se fiche de savoir quelle est la géométrie des pales : bipales, tripales, profils, distributions devrillages et decordes, ici on s’en moque. On parle d’un rotor parfait, qui aurait les performances maximales possibles dans un monde parfait. Bien évidemment, un tel rotor n’existe pas dans le monde réel. On va pondérer ces résultats par un facteur de rendement qui s’appelle la Figure de Mérite : le rotor parfait de la Théorie de Froude aura une Figure de Mérite de 1, et tout rotor réel aura une Figure de Mérite inférieure.
Autrement dit, il est impossible d’espérer de meilleurs résultats que ceux apportés par cette théorie. On sera forcément plus mauvais, et tout l’enjeu du choix des hélices qu’on va faire sera d’être le moins mauvais possible, pour se rapprocher au mieux de la théorie
Les rendements moteurs et ESC
Grâce à la Théorie de Froude, le plus gros du travail de dimensionnement est fait. On a déjà toutes les infos pour concevoir sa frame (encombrement, masse), et choisir la plupart des éléments du quad. Il reste néanmoins un exercice difficile à réaliser : choisir le couple {ESC + moteur + hélice} qui apportera les meilleures performances, c’est-à-dire qui nous rapprochera le plus possible des performances estimées par la Théorie de Froude. Comprenons-nous bien : la Théorie de Froude est indépassable, on ne peut pas faire mieux! Mais on peut faire bien pire. Par exemple, si on choisit une hélice peu performante, ou si on l’appaire avec un moteur incapable de fournir le couple nécessaire pour la faire tourner, le rendement de propulsion va s’effondrer et le temps de vol va se casser la figure.
Pour le choix de l’hélice malheureusement, il n’existe aucune donnée fiable qui te permettra de connaître la Figure de Mérite. Et pourtant, la Figure de Mérite peut varier fortement d’une hélice à une autre, de plus de 20%! Si les fabricants faisaient correctement leur travail, ils fourniraient pour chaque hélice un abaque qui trace l’évolution de la Figure de Mérite en fonction de la traction de la vitesse de la veine d’air. Mais c’est long à faire, c’est un peu galère, ça demande du matériel, alors ils en font l’économie. Quel dommage. En attendant mieux, les seules solutions seront donc le ressenti, l’expérience et les essais. Garde à l’esprit qu’une Figure de Mérite de 0,8 est difficilement atteignable, mais d’un autre côté, même les hélices les plus mal conçues arrivent au moins à 0,5 voire 0,6.
Le moteur, quant-à-lui, doit être correctement dimensionné pour être capable de délivrer la puissance consommée par l’hélice sans que son rendement ne s’effondre, sur toute la plage utile de fonctionnement. Nous n’allons pas nous attarder sur ce sujet ici, car il faudrait un article entier pour gratter le sujet. Tout ce qu’il faut savoir, c’est que :
- Dans l’ensemble, un moteur bien choisi pour une hélice donnée aura un rendement global d’environ 80% à 90% sur toute la plage utile de fonctionnement.
- Le site mini quad test bench est une mine d’informations pour t’aider à choisir le bon moteur et la bonne hélice. Utilise-le sans modération, compare les setups, et n’oublie pas qu’aucun setup ne fera mieux que la Théorie de Froude.

Terminons avec le plus simple à estimer : l’ESC. Son rendement est spécifique aux composants qui le composent et à l’algorithme de contrôle du moteur qui est codé dans son processeur. En FPV, on utilise du BLHeli ou du KISS, qui sont tous des algorithmes de contrôle trapézoïdaux.Bien que moins performants que les algorithmes de contrôle sinusoïdal de type FOC, ces algorithmes trapézoïdaux ont l’avantage d’être simples à mettre en œuvre, et ils procurent un rendement global très satisfaisant: on peut espérer un rendement d’ESC compris entre 75% et 95% sur toute la plage de fonctionnement du moteur. Quelques éléments importants à garder en tête:
- En contrôle trapézoïdal, le rendement d’un ESC s’écroule lorsque le Throttle est bas.
- Surdimensionner un ESC (utiliser un gros ESC sur un petit moteur) n’aura aucun impact négatif sur les performances du système, au contraire! Plus un ESC est capable de passer beaucoup de puissance, plus ses composants seront conçus dans un objectif de réduire les pertes énergétiques. Attention à la masse bien entendu : mettre des ESC plus gros se solde par un ajout de masse qui t’éloignera de ton objectif initial : faire léger.

La batterie
La batterie c’est le nerf de la guerre : c’est le réservoir d’énergie. Pour tout savoir sur une batterie, il faut connaître seulement trois grandeurs qui la caractérisent :
- L’énergie embarquée (Wh) = Tension (V) * Capacité (Ah). C’est la contenance de la batterie, l’énergie que l’on va pouvoir consommer pour faire voler notre appareil. Inutile de s’étaler sur cette grandeur : plus il y en a, plus on vole longtemps.
- La densité énergétique (Wh/kg) =Energie embarquée (Wh) / Masse totale du pack (kg) .C’est la capacité de la batterie à concentrer l’énergie embarquée dans une masse donnée.
- La résistance interne (mR). La résistance interne d’une batterie est l’image de sa capacité à se décharger rapidement. On entend peu parler de résistance interne dans le commerce, et c’est bien dommage. On entend beaucoup plus souvent parler de C-rate, qui veut dire à peu près la même chose mais qui est beaucoup plus simple à manipuler et à pervertir par les fabricants.
Ces trois grandeurs sont la conséquence de nombreux facteurs comme la chimie des cellules, la technologie de fabrication, la qualité du pack, la température, l’âge, etc. Mais tous ces autres facteurs, on s’en fiche car absolument toute la performance de la batterie se résume dans ces 3 paramètres.
C’est pas génial, ça?
Dans le paragraphe 1, nous avons dit qu’il fallait privilégier des densités énergétiques les plus hautes possibles. Mais en l’état actuel des technologies disponibles sur le marché, nous savons que la densité énergétique est souvent inversement proportionnelle à la densité de puissance, soit la capacité de l’accu à se décharger rapidement.
Deux exemples typiques :
LiPo 1100 mAh–100C (Li-Co):
Densité énergétique : 110Wh/kg.
Résistance interne: 3-4mR.
Peut être déchargée en 3min.
Sony VTC6–3000 mAh (Li-Ion NMC) :
Densité énergétique : 230Wh/kg.
Résistance interne : 13mR.
Peut être déchargée en 20 min.
Le choix de batterie va donc être un juste compromis entre la densité énergétique qu’il faudra maximiser, et la capacité de la batterie à délivrer beaucoup de puissance pour que les aractéristiques en vol du quad (vitesse de montée, maniabilité) correspondent à tes attentes initiales. Pour ce qui est du dimensionnement, la règle d’or : pas plus de 50% de la masse totale du quad.

Comment remplir la feuille de calcul?
Fort de toutes ces précieuses informations, tu vas pouvoir ouvrir la feuille de calcul et simplement entrer les 14 valeurs demandées dans la colonne Données d’Entrée. La plupart sont très faciles à connaître, car elles sont directement liées à la configuration matérielle de ton quad : ce sont des données de conception. Il en reste tout au plus 4 difficiles à connaître, valeurs sur lesquelles nous allons nous attarder
- Figure de Mérite du rotor : on en a beaucoup parlé. Sa valeur variera entre 0,6 et 0,8 suivant plein de paramètres que nous ne maîtrisons pas dans cette feuille de calcul comme la géométrie des props, la présence ou non d’obstacles (frame) dans le flux d’air, la vitesse de vol, la vitesse de rotation, etc. Inutile de se faire des nœuds au cerveau ici : une bonne valeur moyenne pour les hélices courantes est à 0,7. Elle donnera des résultats plutôt optimistes, mais très satisfaisants dans la plupart des cas avec une incertitude maîtrisée.
- Cellule–Résistance interne : c’est la résistance interne d’une seule cellule, mesurée pendant la décharge (encourant continu ou DC). Attention, cette valeur est légèrement différente de la valeur mesurée par le chargeur pendant la charge. Elle est généralement plus faible pendant la décharge que pendant la charge. Mais comme il est plus difficile de mesurer la résistance interne pendant la décharge, une bonne façon de procéder est d’utiliser quand-même la valeur lue par le chargeur pendant la charge. Le calcul des pertes énergétiques de la batterie sera légèrement surestimé, mais cela te permettra de prévoir d’éventuelles dégradations des performances de la batterie au fur et à mesure de son utilisation.
- Batterie–densité énergétique : ici, il faut rentrer la densité énergétique du pack de batterie que l’on souhaite utiliser. Si tu as déjà sous la main la batterie que tu souhaites utiliser, alors connaître cette valeur est une formalité : il suffit de calculer l’énergie de la batterie, et la diviser par sa masse. N’oublie pas de vérifier que l’estimation de la masse de batterie faite un peu plus bas dans la feuille de calcul correspond à cette mesure.
- Rendement Moteur + ESC : il dépend lui aussi de facteurs bien trop nombreux. Il existe une règle de grand-mère qui consiste à dire que si le système est correctement dimensionné, on peut espérer un rendement maximum de l’ESC à 95% et un rendement maximum du moteur à 85%. Le rendement global ESC + Moteur sera donc de 0.95*0.85=0.80, soit 80%. Ce rendement est maximal, cela signifie que la réalité sera toujours plus basse, plutôt dans les 70 à 80%. Un système correctement dimensionné ne descendra que très rarement en dessous des 70%. Ici encore, la marge d’incertitude reste assez faible.

Comment lire la feuille de calcul
?
Une fois que tu as rentré toutes les Données d’entrée, le fichier de calcul va estimer les Résultats suivants :
- La puissance et l’intensité moyenne pendant le vol.
- La tension moyenne de la batterie pendant le vol. Attention, cette tension ne doit pas trop s’effondrer par rapport à la tension nominale de la batterie. Si la chute de tension est supérieure à 10% de la tension nominale de la batterie, cela veut dire que la batterie va souffrir et surchauffer.
- L’énergie électrique disponible. C’est l’énergie disponible au vol (en comptant que tu poses ton quad avec un certain pourcentage de capacité restante) à laquelle on soustrait l’énergie perdue par la batterie en chaleur, à cause de sa propre résistance interne. Plus cette énergie restante est faible, plus l’énergie dissipée sera élevée. Et donc, plus la batterie va chauffer et plus sa durée de vie sera réduite.
- Le ratio Masse batterie/MTOW. On ne le répétera jamais assez : c’est un critère de conception! Pas plus de 50%!
- Le temps de vol estimé. Ne serait-ce pas ce que tu cherchais à savoir, à tout hasard?
L’information la plus importante et la plus visuelle, c’est le graphique qui s’affiche en plein milieu de la feuille. La courbe orange de ce graphique représente le temps de vol que tu pourrais espérer obtenir sur ce setup exact, en ne changeant que la masse de la batterie, et en conservant tous les autres paramètres identiques (y compris la densité énergétique). Tu constateras par toi-même que passé 67% de masse de batterie embarquée, le temps de vol va diminuer. L’intersection de la courbe avec les lignes bleues montre où tu te situes avec le setup avec la batterie que tu as sélectionnée dans les Données d’entrée.
Pour conclure
N’hésite pas à jouer avec les paramètres, à les faire varier dans tous les sens pour mieux comprendre quels sont leurs impacts. Tu en développeras une sensibilité qui te permettra, je l’espère, de mieux maîtriser les bases techniques du fonctionnement de nos quads, et surtout de te rendre un peu plus hermétique à la hype et au bullshit commercial de certains fabricants.
Attention toutefois, cette feuille de calcul ne se revendique pas de maîtriser toutes les données de performance d’un miniquad. Son ambition est seulement de donner à l’utilisateur, pour un travail minimal, l’estimation la plus juste possible des performances d’un multirotor. Ces estimations seront forcément fausses car elles se basent sur des hypothèses hyper simplificatrices. Mais une chose est sûre: bien utilisée, cette feuille te donnera toujours des résultats justes à 10% près. Et le plus marrant, c’est qu’elle marche aussi très bien pour des drones professionnels lourds et des multirotors habités.
Sache aussi qu’il n’y a pas de question bête. Je reste donc disponible sur le groupe Culture FPV et sur les réseaux sociaux pour t’expliquer tout ce qui n’est pas encore clair dans cet outil. Et si jamais tu trouves des erreurs ou des suggestions d’amélioration, lâche-toi! Je partage cet outil pour le plaisir, et je le ferai évoluer avec tout autant de plaisir.
Bonne conception, et bons vols!
Florent Roque
4 commentaires
Enfin, je calcule souvent le temps de vol maxi en stationaire en regardant combien consomme le moteur pour le poids de mon Qwad divisé par 4 dans la datasheet du moteur et avec une Lipo dechargeé à 70% :
Temps en heure = Capacité lipo en Ah x 70% / (conso moteur en A pour supporter le Qwad x 4)
Je suis à 9min avec mon calcul et à 14min avec la feuille Excel. Il y a quelque chose qui ne colle pas entre la théorie et les datasheets constructeur.
Idem pour l’efficacité du moteur. Sur la même datasheet plus je tire sur le moteur, plus le courant consommé augmente, plus la poussée augmente mais plus le rendement du moteur en g/W diminue. Pas du tout en phase avec la figure « Motor Effiency (%) ».
Bonjour Florent, J’ai du mal à comprendre « remplacer des props 5″ par des props 6″ sur ton quad se soldera immédiatement par une diminution de 20% de la puissance moyenne consommée à l’hélice ». J’ai sous les yeux la datasheet du moteur Cobra CM-2205-2300 et passer de 5″ à 6″ augmente le courant consommé et en 4S ça fait même chuter le rendement du moteur.
Je te conseil d’en parler directement avec Florent, en le contactant sur le post Facebook de l’article