

Bonjour à tous et bienvenus pour ce nouvel article du guide des composants consacré aujourd’hui aux ESC. Nous continuons ainsi notre parcours sur la ligne de courants forts. Il avait débuté avec notre article sur les batteries LiPo, suivi par celui sur les PDB.
Il s’agira ici de comprendre ce qu’est un ESC, connaitre son rôle sur nos machines et distinguer ses caractéristiques dans le but de choisir un modèle adapté à sa machine.
Qu’est-ce qu’un ESC ?
ESC est l’acronyme de « Electronic Speed Controler », que l’on traduira en Français par « Controleur de Vitesse Électronique ». Mais de quel élément est-il destiné à contrôler la vitesse ? Vos moteurs bien sûr. Le rôle d’un ESC est de recevoir les informations fournies par votre contrôleur de vol et en fonction, faire tourner vos moteurs plus ou moins vite.
Entrées et sorties
Les entrées et sorties d’un ESC sont standardisées, on retrouve systématiquement les mêmes :
Entrées
Alimentation
Il s’agit de l’alimentation en électricité reçue par l’ESC qui sera transmise au moteur. Ces deux fils seront soudés aux bornes + et – disponibles sur la PDB et dédiés à cette utilisation.
Signaux
Une seconde paire de fils (beaucoup plus fins) sont disponibles en entrée de notre composant. Ce sont ceux permettant le transit des instructions entre la FC et l’ESC. Dans notre cas, la FC doit posséder au minimum 4 bornes dédiés aux signaux des ESC afin de contrôler les 4 moteurs associés. Ceux-ci se trouvent le plus souvent sous la dénomination « S1 » pour le moteur 1, et ainsi de suite pour les quatre autres.
Sorties
Sorties moteur
Ces sorties sont au nombre de trois et se présentent sous la forme de pads de soudure disposés à l’extrémité des ESC. Ces pads sont destinés à y souder les 3 fils provenant des moteurs afin de l’alimenter.
BEC
Le BEC pour « Battery Eliminator Circuit » est destiné à fournir une alimentation, le plus souvent 5 Volts, à d’autres composants. En aéromodélisme, cela est souvent utilisé pour alimenter le récepteur et les servos d’un avion ou d’un hélicoptère qui demandent une tension spécifique et ne requiert pas une forte intensité pour fonctionner.
Dans le cas d’un Racer, nous disposons d’une PDB qui s’emploie à fournir les différentes tensions requises aux composants de votre machine. Il est donc inutile de disposer d’alimentation supplémentaire via les ESC.
Caractéristiques
Les caractéristiques d’un ESC sont sa forme, sa tension admissible, son courant admissible et son protocole. Nous allons voir tout de suite ces éléments :
La forme
Comme vous avez déjà pu le constater pendant la lecture de notre guide d’achat, on retrouve deux formes d’ESC, les 4 en 1 et les classiques.
Les 4 en 1
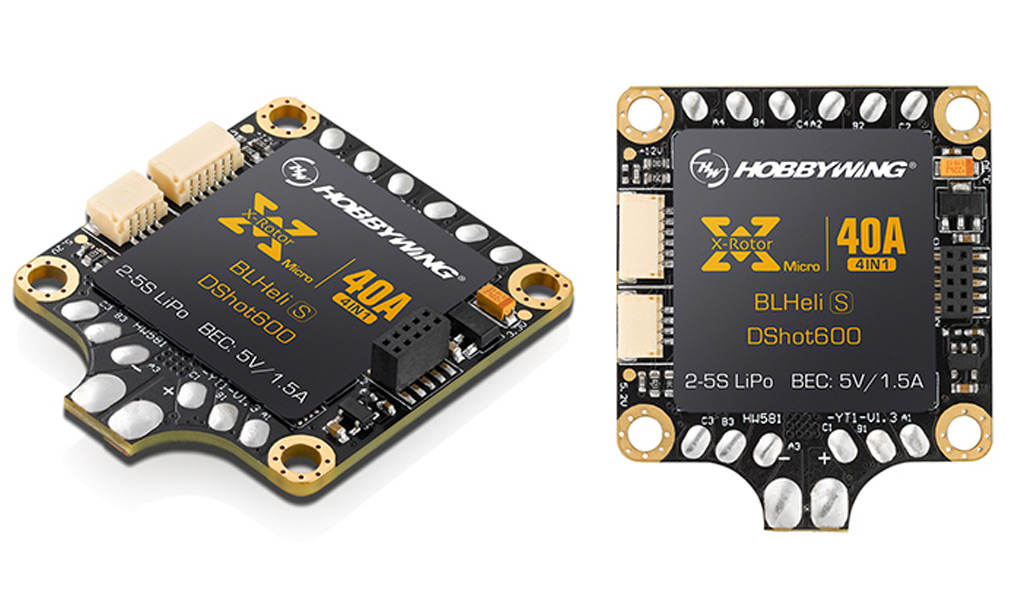
Ce type de composant est physiquement composé des 4 ESC disposés sur le même circuit imprimé. Pour des raisons pratiques, ce circuit est approximativement de la même taille que votre contrôleur de vol et sera amené à être empilé sous ce dernier. Certains d’entre eux sont même pourvus de pins disposés verticalement permettant le raccordement entre ESC et FC sans aucune soudure. C’est le cas du modèle HobbyWing présent dans le guide. Cette option est très pratique pour gagner du poids et du temps pendant les montages et démontages !
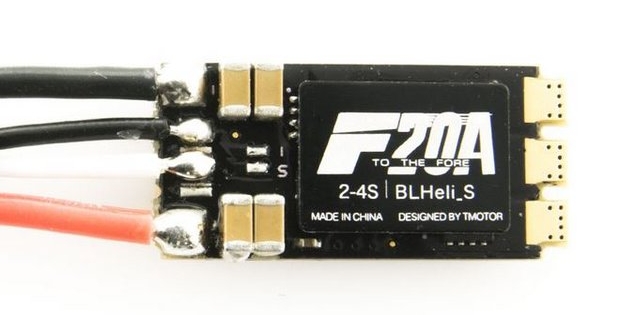
Les classiques
Les ESC classiques sont uniques à chaque moteur. On en retrouve donc un au bout de chaque moteur, placé sur le bras du quad’. Ils se présentent sous la forme d’un PCB dont la taille varie généralement en fonction de son courant admissible et/ou de la qualité des composants embarqués.
La tension
De la même façon que pour une PDB, les ESC peuvent accepter une plage de tension plus ou moins grande selon le modèle. On retrouve donc les mêmes inscriptions précisant le nombre de « S » acceptés par le circuit.
Pour rappel, le nombre de « S » inscrit sur l’ESC fait référence au nombre de cellules présentes dans les LiPo’s que vous utiliserez sur votre machine. Veillez donc, comme pour la PDB, à choisir du matériel compatible avec les batteries prévues.
Le courant
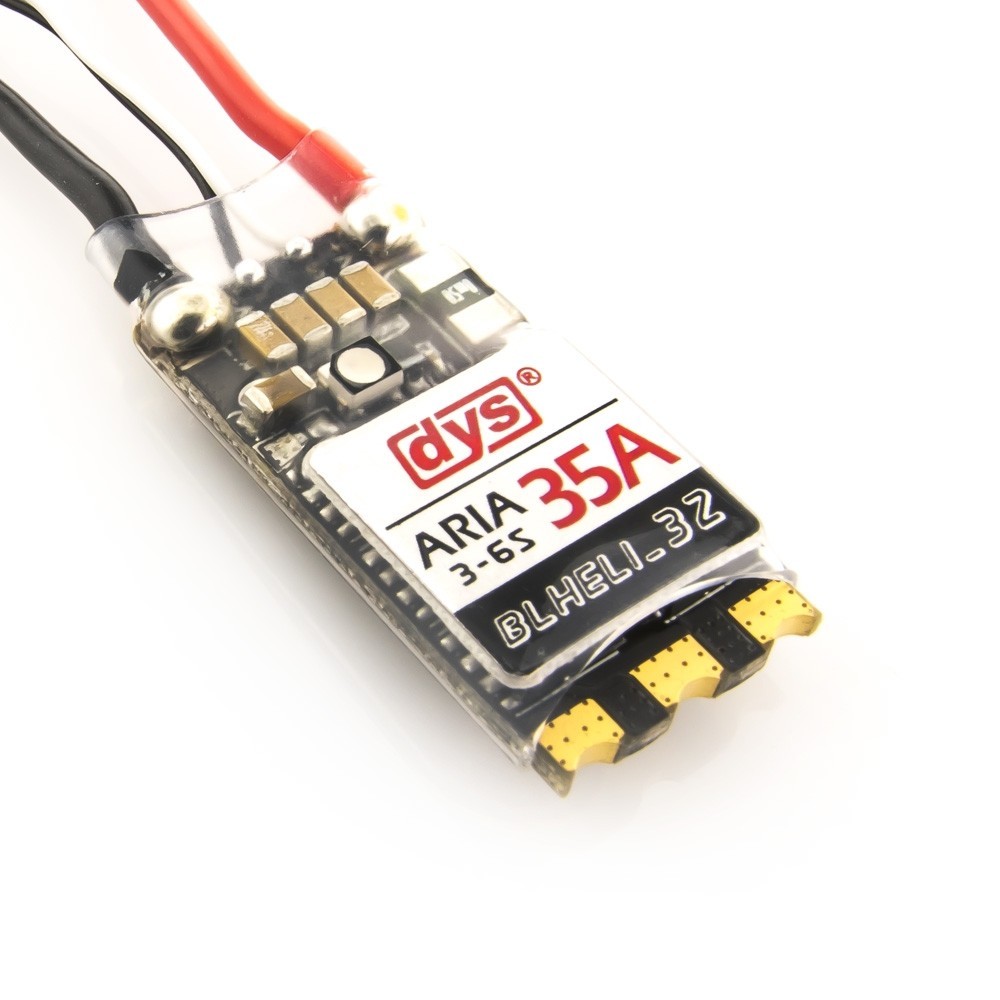
Le courant nominal est un point important à prendre en compte. En effet, il est directement en relation avec les moteurs que vous souhaitez utiliser. Prenons comme exemple un Emax RS2205S débitant 35 ampères de courant au maximum pour un type d’hélice donné. L’ESC raccordé à ce moteur devra donc être capable de fournir les 35 ampères demandés sous peine d’être endommagé, voir dans certains cas de partir en fumée !
Il est à mettre en lumière que les 35 ampères demandés par le moteur sont dans le cas ou les gaz sont poussés à 100%. C’est ainsi que j’aborde avec vous la notion de courant en pointe. Il s’agit d’une intensité supérieure à l’intensité nominale qui sera tolérée par l’ESC pendant une courte période. On retrouve souvent cette valeur dans les descriptions avec le terme « burst ». Ce paramètre est exprimé en ampères et en temps, par exemple « 35a (10sec) » soit 35 ampères tolérés sur une durée maximum de 10 secondes.
Faire le bon choix en fonction du courant
Fort de ces connaissances, on peut partir sur 2 philosophies distinctes pour le choix d’un ESC :
- Choisir un ESC dont le courant nominal est égal au courant maximum du moteur choisi
- Choisir un ESC dont le courant nominal est plus faible, mais qui possède un courant en pointe égal au courant maximum des moteurs
Mon conseil pour ce choix est de ne pas faire d’économies sur ce genre de choses, et préférer des ESC dont le courant nominal est égal au courant max que demandera votre moteur. Pourquoi ?
La sécurité
Tout d’abord par mesure de sécurité. L’électronique n’est pas toujours une science exacte et certains composants peuvent partir en fumée lorsqu’ils sont poussés à leur limite. Cela serait dommage de voir votre machine tomber du ciel à cause d’un ESC grillé sur un coup de gaz non ? D’autant plus qu’au moment du drame, le quad serait en pleine accélération … Pour éviter de pousser l’ESC à ses limites, il est donc préférable de choisir un modèle qui aura ainsi un courant nominal égal au courant maximum du moteur. De cette façon, l’ESC disposera toujours d’une marge confortable en cas de forte sollicitation, sa valeur de « burst » n’étant pas atteinte.
Les hélices
On la voyait bien pointer le bout de son bord d’attaque à celle-ci … Depuis le temps qu’on parle des moteurs … Il fallait bien aborder le sujet des hélices !
Le style et les préférences d’un pilote évoluent au fil du temps, c’est un fait. Principalement grâce à toutes ces LiPo’s vidées et ces vidéos soigneusement décortiquées. Vous volez actuellement avec certain(s) modèles d’hélices, qui seront amenés à évoluer au grès de vos envies et de votre pilotage c’est bien normal. La technologie évolue également et de nouveaux modèles voient le jour. Mais monter des hélices sur un moteur n’est pas un geste anodin. Il faut que son diamètre et son pas soient en adéquation avec les caractéristiques du moteur. Toutes les hélices ne sont pas égales face à la nature, et n’auront pas le même couple, ni le même rendement. Il est donc normal que votre moteur consomme plus ou moins selon ce qui sera monté sur sa cloche.
Il est donc à retenir que sur une hélice, plus le nombre de pâles et la valeur du pas sont élevés, plus le moteur consommera. Si le moteur consomme d’avantage, l’ESC qui se trouve derrière doit pouvoir l’alimenter quoi qu’il arrive. Il est donc bon de garder une petite marge afin de pouvoir utiliser des hélices plus « gourmandes » dans le futur.
La tolérance d’un ESC à subir un fort courant en pointe pendant quelques secondes est ici fort utile dans le but de pouvoir encaisser de grosses accélérations avec des hélices munies d’un pas conséquent.
Le protocole
Si on devait résumer le rôle d’un ESC, on pourrait le qualifier d’interprète officiant entre la FC et les moteurs afin qu’ils puissent dialoguer ensemble.

Mais pourquoi et comment ces échanges d’informations s’effectuent ? Nous allons le voir tout de suite !
Le dialogue entre FC, ESC et moteur
Pour garder votre Racer dans les airs, votre contrôleur de vol commande en temps réel les 4 moteurs afin de faire varier leur vitesse de façon cohérente. Ces commandes ne sont pas envoyées directement aux moteurs mais aux ESC qui eux vont convertir ces ordres et alimenter le moteur en fonction.
Si la consigne envoyée par le contrôleur de vol est la plupart du temps la vitesse de rotation du moteur, ce n’est pas toujours le cas. Cela peut aussi être l’émission d’un beep (comme lorsque vous branchez une LiPo) ou un retour d’information de l’ESC vers la FC donnant la vitesse de rotation réelle du moteur.
Cette communication entre contrôleur de vol et ESC est numérique. Elle est effectué selon des protocoles de communication précis qui peuvent être :
- PWM
- Oneshot125
- Oneshot 42
- Multishot
- Dshot
- Dshot150
- Dshot300
- Dshot600
- DShot1200
- ProShot
A l’origine, le PWM permettait de contrôler beaucoup de choses sur un modèle réduit, en particulier les servos. Ce protocole est utilisé directement par le récepteur radio et envoyé aux servos branchés directement dessus.
Depuis l’apparition des contrôleurs de vols numériques, les protocoles de communication ont évolués et sont devenus bien plus rapides.
Je ne parlerais pas de vitesses précises de chaque protocole pour des raisons de simplicité, mais je vous propose plutôt ce diagramme qui compare les vitesses des protocoles entre eux :

L’ordre d’apparition de ces protocoles suis plus ou moins le même schéma, le dernier sorti étant immanquablement plus rapide que son prédécesseur. Il est logique que lors de votre prochain achat, vous décidiez de prendre le protocole le plus rapide, et vous aurez raison. Est-il nécessaire de changer ses anciens ESC pour des modèles plus rapides ? Je ne pense pas, à moins que vous ne soyez un très bon pilote, vous ne verrez probablement pas la différence.
Le firmware
Vos ESC sont plus intelligents que vous ne le croyez ! Ceux-ci fonctionnent grâce à un petit programme stocké à l’intérieur qui leur permet de décoder les signaux de la FC. Certains s’offrent même le luxe d’être paramétrables. Au même titre que votre contrôleur de vol fonctionne grâce à BetaFlight, RaceFlight ou Kiss, un ESC possède également son propre firmware.
Parmi eux on compte :
- SimonK
- BLHeli
- BLHeli_S
- BLHeli_32
- KISS
SimonK n’est plus utilisé à l’heure actuelle, ou très peu du fait de sa relative ancienneté. C’est toutefois un firmware de qualité qui à su longtemps satisfaire les pilotes.
BLHeli quand à lui est très utilisé dans le monde du drone. Ses versions ont évoluées, de BLHeli à BLHeli_S jusqu’à BLHeli_32 de nos jours. Pourquoi 32 ? Car ces ESC fonctionnent avec des puces puissantes calculant sur 32 bits. Ils peuvent ainsi calculer les informations plus vite, recevoir et répondre des commandes complexes. Inversion des moteurs, consommation de chaque moteur, les possibilités sont quasi infinies avec ce matériel.
Kiss, comme son nom l’indique, sera destiné à fonctionné de concert avec les contrôleurs de vol de la marque.
Le filtrage
Nous en parlions dans l’article sur les PDB, le filtrage du courant est devenu quasi essentiel sur un quad. Le condensateur ajouté permet de limiter le « bruit » présent dans le circuit électrique. Je vous le donne en mille Émile, qui sont les principaux générateurs de bruit ? Les moteurs et les ESC ! Pourquoi ? Les moteurs, en tournant, génèrent du courant. Celui-ci remontent dans les ESC, puis dans le reste du circuit si il n’est pas filtré. Dans le même temps, les ESC traitants des signaux faibles et numériques en provenance de la FC. tout ce cocktail peut donner une sacrée soupe si tous ces signaux ne restent pas bien à leur place. C’est pourquoi il est important de mettre un point d’honneur au choix de ses ESC.
A noter
Il y a une chose importante à mettre en lumière concernant le filtrage. Tous les composants récents, en particulier PDB, FC et ESC possèdent déjà un nombre impressionnant de condensateurs. Si vous vous tournez vers du matériel neuf ou récent, il y a de fortes chances pour que vous n’ayez aucun besoin de rajouter un gros condensateur disgracieux sur votre machine.
Doit-on souder la masse du signal ?
Question très discutée que celle-ci … Et il y a autant d’avis que de personnes pour les défendre ! Nous allons toutefois essayer d’y répondre ensemble.
Suis-je à la masse ?
Dans un premier temps, on pourrait partir du constat que le circuit électrique d’un Racer est un circuit fermé ayant toutes ses masses communes. La preuve en est, testez à l’aide d’un multimètre les pads de votre PDB ou FC. Vous observerez que tous les pads siglés « GND » ou » – » sonnent si testés ensemble. Si cette masse est commune pour tous, alors la masse du signal est commune à la masse d’alimentation en courant fort de l’ESC.
Pourquoi se donner la peine de la relier alors ? Pour rester sur des notions simples, j’argumenterais sur le fait que pour tout circuit électrique, le chemin le plus court est toujours le meilleur. Une masse sert de référentiel à sa phase, elle est le niveau zéro. Si son chemin n’est pas direct jusqu’à la FC, il peut être perturbé par autant d’éléments qu’il traversera, à savoir des fils et la PDB. Si la référence du signal est perturbée, ce dernier est bien plus difficile à interpréter et l’ESC comme la FC auront alors bien du mal à se comprendre.
Lorsque vous parlez avec quelqu’un, vous comprenez distinctement ce que cette personne à a vous dire lorsqu’elle se trouve devant vous ? Faites la même expérience en vous plaçant au fond d’une pièce pleine d’autres personnes. Pas sûr que votre discussion soit aussi confortable que dans le premier cas ! Pour votre ESC, c’est exactement la même chose.
Toutefois il existe des FC qui ne comportent pas connexions pour la masse de chaque ESC. C’est souvent le cas des cartes All In One car elles disposent à la fois de la fonction de FC et de PDB. Libre à vous alors de souder la masse en commun avec celle de l’alimentation.
Pour les curieux
Pour ceux d’entre vous qui voudraient rentrer un peu plus dans le détail, je vous conseil cette excellente vidéo de Joshua Bardwell traitant du sujet :

J’ose espérer, amis pilotes, que ma prose dronistique vous aura été instructive. J’aurais le plaisir de vous retrouver prochainement pour un prochain article traitant des moteurs. D’ici là, restez informés des news Culture FPV via la page et le groupe Facebook, les notifications disponibles directement sur le site via votre navigateur, et … FLY SAFE !
12 commentaires
Je veux un livre dans laquelle je pourrais trouver comment fabriquer un drone ainsi que ses composants telques les ESC ,FCB et autre
Il va falloir l’écrie, alors :)
salut, je rencontre un problème avec mon ESC 60A , il y’a eu un court-circuit au niveau des borne de la batterie et depuis lors quand je connecte la batt l’ESC beep une fois et au bout de 2s quand je le touche avec mon doigt il fait 5 beep et se met a l’arret le moteur ne démarre pas.
quelqu’un a t-il déjà eu ce problème?
merci d’avance pour votre aide
Si il y a eu un cours circuit, y’a des chances qu’il soit dead.
Bonjour, Intéressant les informations sur le protocole Dshot. Je ne connaissais pas ce protocol il me fait pensé au protocole SPI mais en beaucoup plus lent d’où ma question pourquoi ne pas utiliser une interface SPI qui peut monter jusqu’à 50Mbits/s ? Si j’ai bien compris le Dshot1200 c’est 1.2Mbits/s n’est ce pas?
bonjour je ne trouve pas l information dans la sortie du courant
Bonjour, pour les esc 4 en 1, le courant indiqué est celui total ou par moteur ?
Et dans le dernier paragraphe « je vous conseille »
Bonjour
Je vois régulièrement sur le matériel le terme « GND » qui vient de l’Anglais « Ground » qui veut dire « Terre ».
Je trouve ce terme mauvais car il ne s’agit pas de la Terre mais d’une Masse ou – que l’on rencontre sur du courant continu
alors que le terme « Terre » est le retour à la terre d’une perte de courant sur de l’alternatif…
merci pour vos articles.
Kic
Guizmomogway, puisque apparemment il est bienvenu de corriger les petites fautes de français, je vais faire de même :
un participe passé sur « j’ai saigné des yeux » et pas « j’ai saigner des yeux » serait bienvenu.
Et idéalement, « j’éditerais » à la 1ère personne du futur devient « j’éditerai ».
Merci
Très intéressant, merci beaucoup de partager ta science, c’est clair !
Par contre dernier paragraphe, « j’aurez » j’ai saigner des yeux, corrige, et j’éditerais !!
Merci, c’est corrigé, et merci pour tes encouragements